SoMaRo
Heute übliche, starre Greifwerkzeuge von Robotern sind nicht in der Lage, weiche und empfindliche Objekte mit uneinheitlicher Geometrie wie Obst, Gemüse und andere Lebensmittel ohne Beschädigung schnell zu greifen, wie es Menschen intuitiv und mühelos können. Erste softrobotische Greifer-Entwicklungen mit weichen Greifflächen lösen das Problem nicht, da sie keinerlei Sensorik u.a. für eine taktile Rückmeldung enthalten und der Greifschluss an das zu greifende Objekt dadurch ungeregelt erfolgt - somit fehlt es an der für industrielle Prozesse zwingend notwendigen Prozesssicherheit und viele der empfindlichen Objekte werden geschädigt.
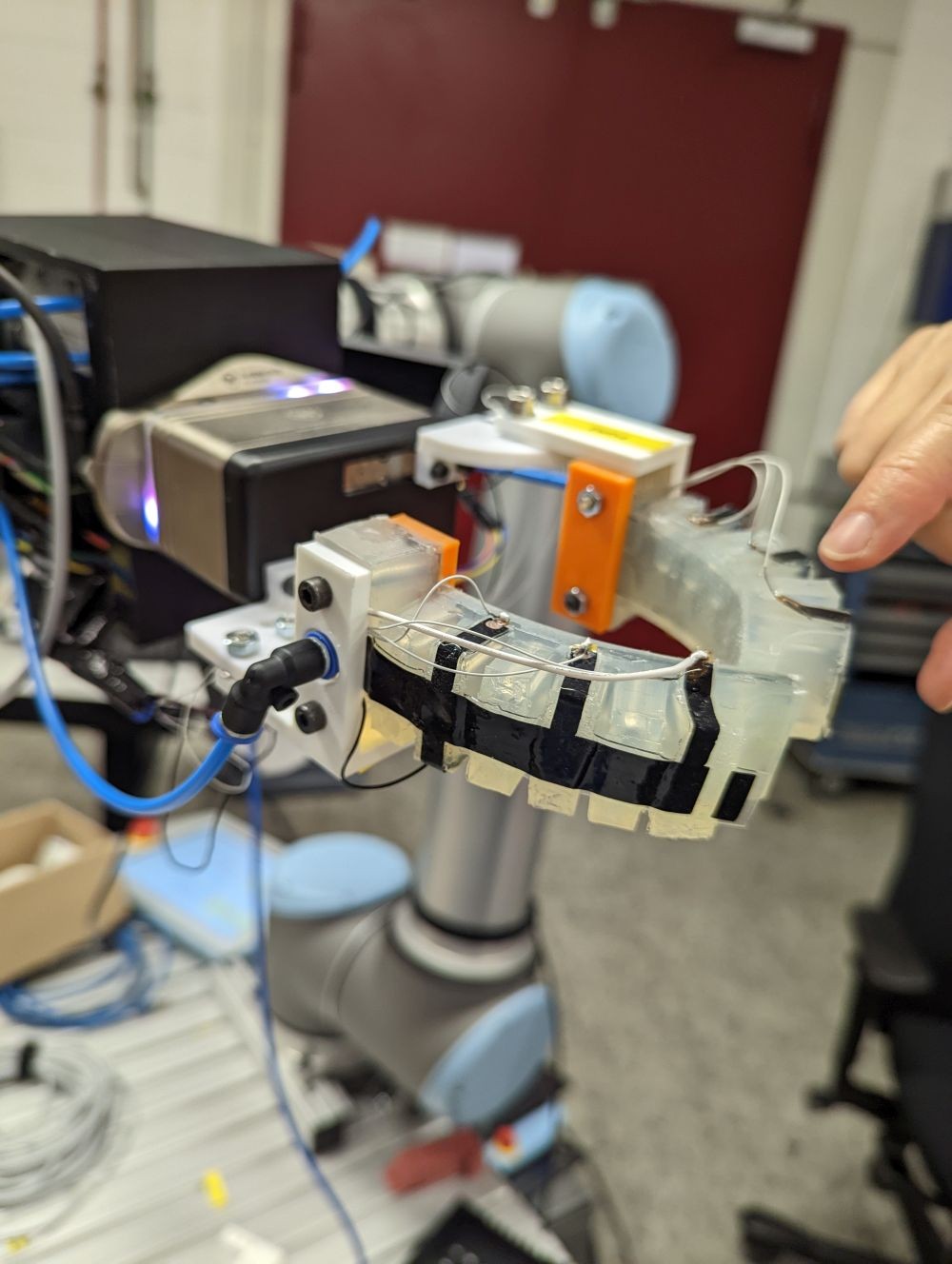
Im interdisziplinären Projekt SoMaRo wird in Zusammenarbeit mit den Fraunhofer Instituten IPK, ISC und IAP ein einzigartiger Roboter-Greifer auf Basis weicher, adaptiv regelbarer Soft-Kinematiken mit integrierten Soft-Aktuatoren, -Sensoren und -Elektroniken auf der Grundlage neuartiger Smart Materials entwickelt, die sich mittels Software-Regelung mit elektrischen Feldern gezielt verformen lassen.
Im Vorhaben entsteht eine vollkommen neuartige Technologie-Plattform für adaptive Softgreifer auf Grundlage von in Soft-Kinematiken integrierter Soft-Aktuatorik, Soft-Sensorik und Soft-Elektronik. Die Arbeiten der Gruppe System on Flex sind dabei fokussiert auf die Entwicklung und Herstellung der benötigten dehnbaren Elektronik-Komponenten, sowie Dehn- und Scherkraft-Sensorik. Die dehnbare Elektronik wird unter Verwendung der SCB-Technologie auf thermoplastischem Polyurethan unter Einsatz mäanderförmiger Kupfer-Leiterbahnen realisiert. Als innovativer zukunftsweisender Ansatz werden auch Leiterbahnen auf Basis einer bei Raumtemperatur flüssigen Legierung in Polyurethan und Silikon untersucht. Diese kommen auch als Sensoren zum Einsatz. Ausserdem erfolgt die Entwicklung der Hochspannungsansteuerung für Greifer basierend auf HASEL-Aktuatoren.